Implicit Frictional Dynamics with Soft Constraints
Egor Larionov, Andreas Longva, Uri M. Ascher, Jan Bender, Dinesh K. Pai,
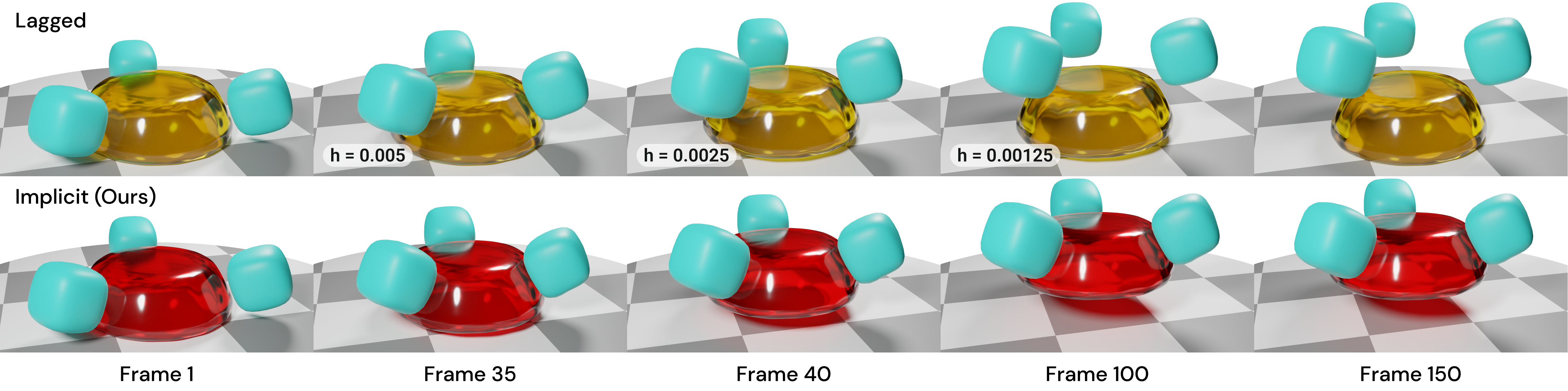
Dynamics simulation with frictional contacts is important for a wide range of applications, from cloth simulation to object manipulation. Recent methods using smoothed lagged friction forces have enabled robust and differentiable simulation of elastodynamics with friction. However, the resulting frictional behavior can be inaccurate and may not converge to analytic solutions. Here we evaluate the accuracy of lagged friction models in comparison with implicit frictional contact systems. We show that major inaccuracies near the stick-slip threshold in such systems are caused by lagging of friction forces rather than by smoothing the Coulomb friction curve. Furthermore, we demonstrate how systems involving implicit or lagged friction can be correctly used with higher-order time integration and highlight limitations in earlier attempts. We demonstrate how to exploit forward-mode automatic differentiation to simplify and, in some cases, improve the performance of the inexact Newton method. Finally, we show that other complex phenomena can also be simulated effectively while maintaining smoothness of the entire system. We extend our method to exhibit stick-slip frictional behavior and preserve volume on compressible and nearly-incompressible media using soft constraints.
| Paper | |
| Code | GitHub |
| Video | WEBM, YouTube |
BibTeX
@misc{larionov2022implicitfriction,
title={Implicit frictional dynamics with soft constraints},
author={
Egor Larionov and
Andreas Longva and
Uri M. Ascher and
Jan Bender and
Dinesh K. Pai
},
year={2022},
eprint={2211.10618},
archivePrefix={arXiv},
primaryClass={cs.GR},
url={https://arxiv.org/abs/2211.10618},
}