
Egor Larionov
I am a researcher currently working at Meta Reality Labs.I am interested in physically-based animation, geometry processing and scientific computing. More about me.
Publications
-
 SkinCells: Sparse Skinning using Voronoi Cells,
SkinCells: Sparse Skinning using Voronoi Cells,
Egor Larionov, Igor Santesteban, Hsiao-yu Chen, Gene Lin, Philipp Herholz, Ryan Goldade, Ladislav Kavan, Doug Roble, Tuur Stuyck
Computer Graphics Forum (Eurographics) ,
-
 Self-supervised Learning of Latent Space Dynamics,
Self-supervised Learning of Latent Space Dynamics,
Yue Li, Gene Wei-Chin Lin, Egor Larionov, Aljaz Bozic, Doug Roble, Ladislav Kavan, Stelian Coros, Bernhard Thomaszewski, Tuur Stuyck, Hsiao-yu Chen
Symposium on Computer Animation (SCA) ,
-
 Neuralocks: Real-Time Dynamic Neural Hair Simulation,
Neuralocks: Real-Time Dynamic Neural Hair Simulation,
Gene Wei-Chin Lin, Egor Larionov, Hsiao-yu Chen, Doug Roble, Tuur Stuyck
Computer Graphics Forum (Eurographics) ,
-
 Quaffure: Real-Time Quasi-Static Neural Hair Simulation ,
Quaffure: Real-Time Quasi-Static Neural Hair Simulation ,
Tuur Stuyck, Gene Wei-Chin Lin, Egor Larionov, Hsiao-yu Chen, Aljaz Bozic, Nikolaos Sarafianos, Doug Roble
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) ,
-
 PGC: Physics-Based Gaussian Cloth from a Single Pose,
PGC: Physics-Based Gaussian Cloth from a Single Pose,
Michelle Guo, Matt Jen-Yuan Chiang, Igor Santesteban, Nikolaos Sarafianos, Hsiao-yu Chen, Oshri Halimi, Aljaž Božič, Shunsuke Saito, Jiajun Wu, C. Karen Liu, Tuur Stuyck, Egor Larionov
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) ,
-
 Dress Anyone: Automatic Physically-Based Garment Pattern Refitting,
Dress Anyone: Automatic Physically-Based Garment Pattern Refitting,
Hsiao-yu Chen, Egor Larionov, Ladislav Kavan, Gene Lin, Doug Roble, Olga Sorkine-Hornung, Tuur Stuyck
Symposium on Computer Animation (SCA) ,
-
 DiffAvatar: Simulation-Ready Garment Optimization with Differentiable Simulation,
DiffAvatar: Simulation-Ready Garment Optimization with Differentiable Simulation,
Yifei Li, Hsiao-yu Chen, Egor Larionov, Nikolaos Sarafianos, Wojciech Matusik, Tuur Stuyck
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) ,
-
 Estimating Cloth Elasticity Parameters From Homogenized Yarn-Level Models,
Estimating Cloth Elasticity Parameters From Homogenized Yarn-Level Models,
Joy Xiaoji Zhang, Gene Wei-Chin Lin, Lukas Bode, Hsiao-yu Chen, Tuur Stuyck, Egor Larionov
ACM SIGGRAPH Conference on Motion, Interaction, and Games (MIG) ,
-
 In situ measurement of friction on the human body,
In situ measurement of friction on the human body,
Pearson A. Wyder-Hodge, Egor Larionov, Dinesh K. Pai
Tribology International ,
-
 Constrained dynamics with frictional contact on smooth surfaces,
Constrained dynamics with frictional contact on smooth surfaces,
Egor Larionov
PhD Thesis (University of British Columbia) ,
-
 Implicit Frictional Dynamics with Soft Constraints,
Implicit Frictional Dynamics with Soft Constraints,
Egor Larionov, Andreas Longva, Uri M. Ascher, Jan Bender, Dinesh K. Pai
IEEE Transactions on Visualization and Computer Graphics (TVCG) ,
-
 In situ measurement of friction on curved surfaces,
In situ measurement of friction on curved surfaces,
Pearson A. Wyder-Hodge, Egor Larionov, Dinesh K. Pai
Tribology International ,
-
 Simulating deformable objects for computer animation: a numerical perspective,
Simulating deformable objects for computer animation: a numerical perspective,
Uri M. Ascher, Egor Larionov, Seung Heon Sheen, Dinesh K. Pai
Journal of Computational Dynamics ,
-
 Volume Preserving Simulation of Soft Tissue with Skin,
Volume Preserving Simulation of Soft Tissue with Skin,
Seung Heon Sheen, Egor Larionov, Dinesh K. Pai
Proceedings of the ACM on Computer Graphics and Interactive Techniques ,
-
 Frictional Contact on Smooth Elastic Solids,
Frictional Contact on Smooth Elastic Solids,
Egor Larionov, Ye Fan, Dinesh K. Pai
ACM Transactions on Graphics ,
-
 The Human Touch: Measuring Contact with Real Human Soft Tissues,
The Human Touch: Measuring Contact with Real Human Soft Tissues,
Dinesh K. Pai, Austin Rothwell, Pearson Wyder-Hodge, Alistair Wick, Ye Fan, Egor Larionov, Darcy Harrison, Debanga R. Neog, Cole Shing
ACM Transactions on Graphics (SIGGRAPH) ,
-
 Variational Stokes: A Unified Pressure-Viscosity Solver for Accurate Viscous Liquids,
Variational Stokes: A Unified Pressure-Viscosity Solver for Accurate Viscous Liquids,
Egor Larionov*, Christopher Batty*, Robert Bridson (*Joint first authors)
ACM Transactions on Graphics (SIGGRAPH) ,
-


Updates
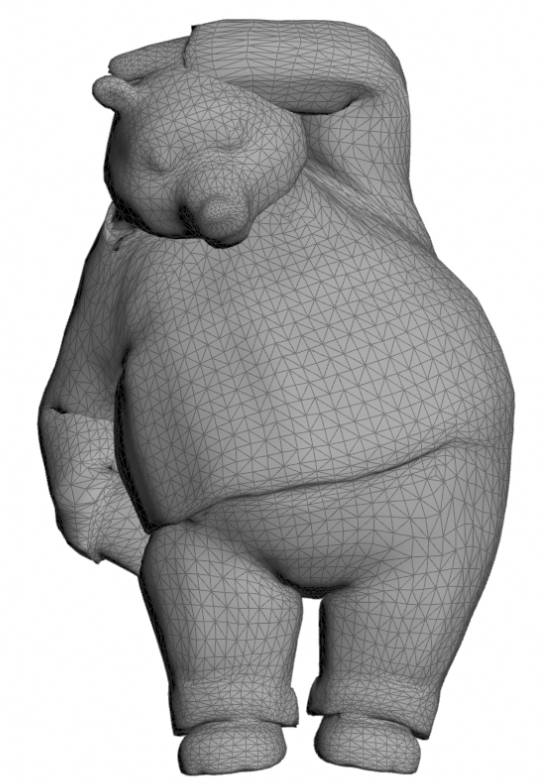
SkinCells: Sparse Skinning using Voronoi Cells
For decades, real-time skinning has been the cornerstone of character animation in visual effects and games. Despite its importance, the creation of animatable digital assets remains a labor-intensive manual process. Existing automated tools frequently struggle with intricate ge…
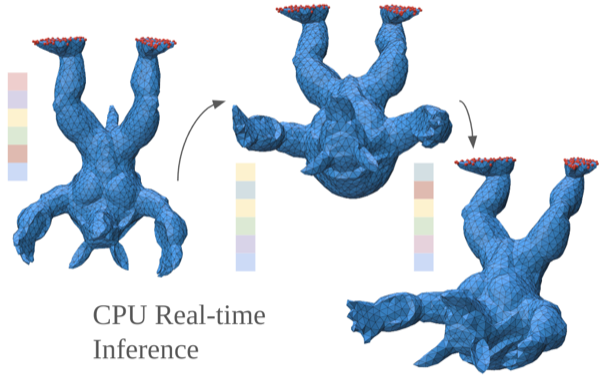
Self-supervised Learning of Latent Space Dynamics
Modeling the dynamic behavior of deformable objects is crucial for creating realistic digital worlds. While conventional simulations produce high-quality motions, their computational costs are often prohibitive. Subspace simulation techniques address this challenge by restrictin…
Neuralocks: Real-Time Dynamic Neural Hair Simulation
Real-time hair simulation is a vital component in creating believable virtual avatars, as it provides a sense of immersion and authenticity. The dynamic behavior of hair, such as bouncing or swaying in response to character movements like jumping or walking, plays a significant …
Quaffure: Real-Time Quasi-Static Neural Hair Simulation
Realistic hair motion is crucial for high-quality avatars, but it is often limited by the computational resources available for real-time applications. To address this challenge, we propose a novel neural approach to predict physically plausible hair deformations that generalize…
PGC: Physics-Based Gaussian Cloth from a Single Pose
We introduce a novel approach to reconstruct simulation-ready garments with intricate appearance. Despite recent advancements, existing methods often struggle to balance the need for accurate garment reconstruction with the ability to generalize to new poses and body shapes or r…
Dress Anyone: Automatic Physically-Based Garment Pattern Refitting
Well-fitted clothing is essential for both real and virtual garments to enable self-expression and accurate representation for a large variety of body types. Common practice in the industry is to provide a pre-made selection of distinct garment sizes such as small, medium and la…
DiffAvatar: Simulation-Ready Garment Optimization with Differentiable Simulation
The realism of digital avatars is crucial in enabling telepresence applications with self-expression and customization. While physical simulations can produce realistic motions for clothed humans, they require high-quality garment assets with associated physical parameters for c…
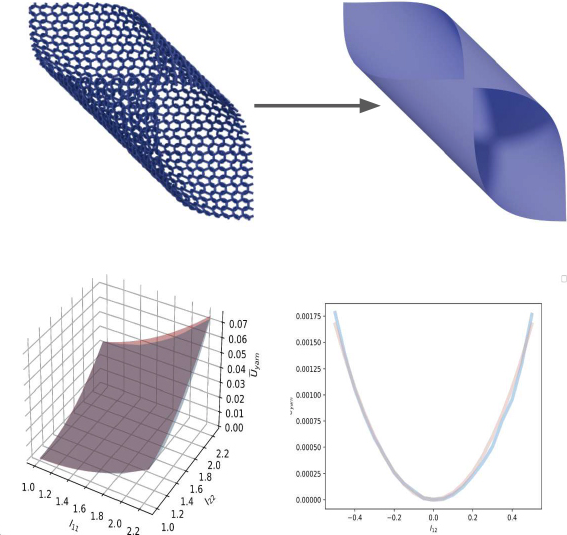
Estimating Cloth Elasticity Parameters From Homogenized Yarn-Level Models
Using knowledge of fabric yarn structure and material properties, we propose a forward estimation pipeline to generate realistic shell-level simulations with automatically determined material parameters. For each real-world fabric, we start by observing the underlying yarn struc…
PhysGraph: Physics-Based Integration Using Graph Neural Networks
Physics-based simulation of mesh based domains remains a challenging task. State-of-the-art techniques can produce realistic results but require expert knowledge. A major bottleneck in many approaches is the step of integrating a potential energy in order to compute velocities o…
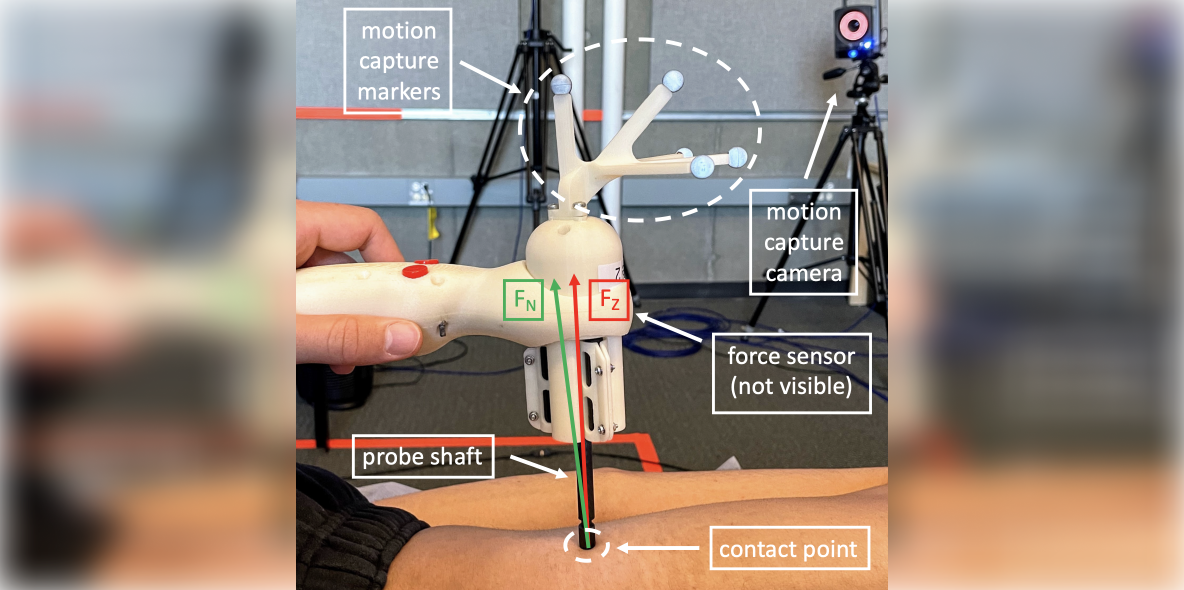
In situ measurement of friction on the human body
Measuring friction on the human body is challenging on areas where the surface of the skin is curved. Handheld devices for measuring friction may make it easier to rapidly measure from hard-to-reach areas, however, the orientation of the probe relative to the surface is often sub…
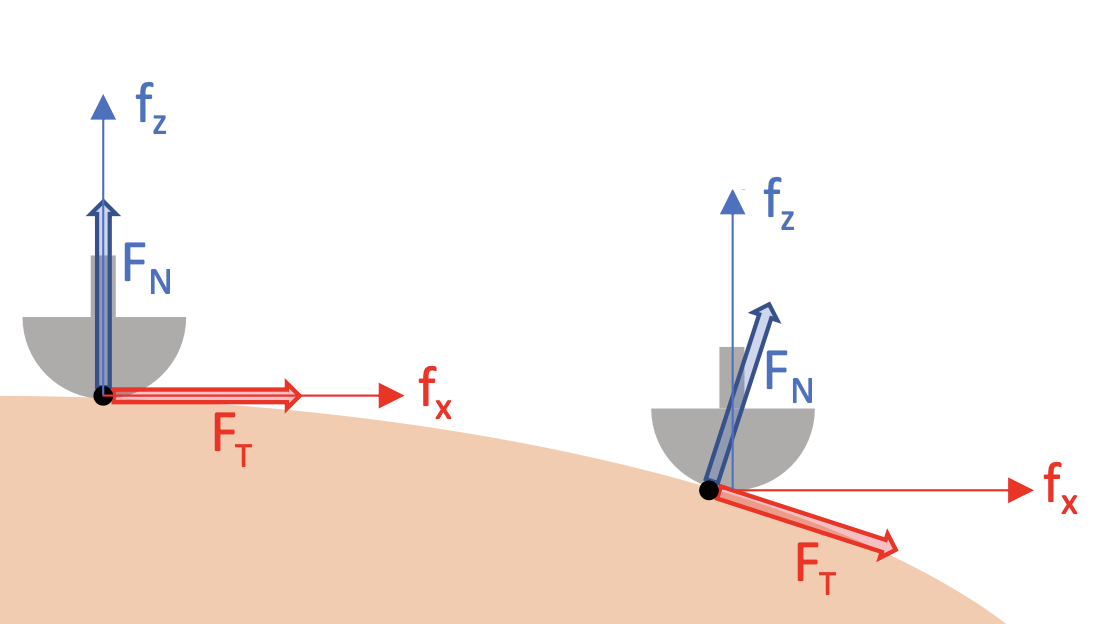
Constrained dynamics with frictional contact on smooth surfaces
Friction and contact pose a great challenge to efficient and accurate simulation of deformable objects for computer graphics and engineering applications. In contrast to many engineering applications, simulation software for graphics often permits larger approximation errors in …
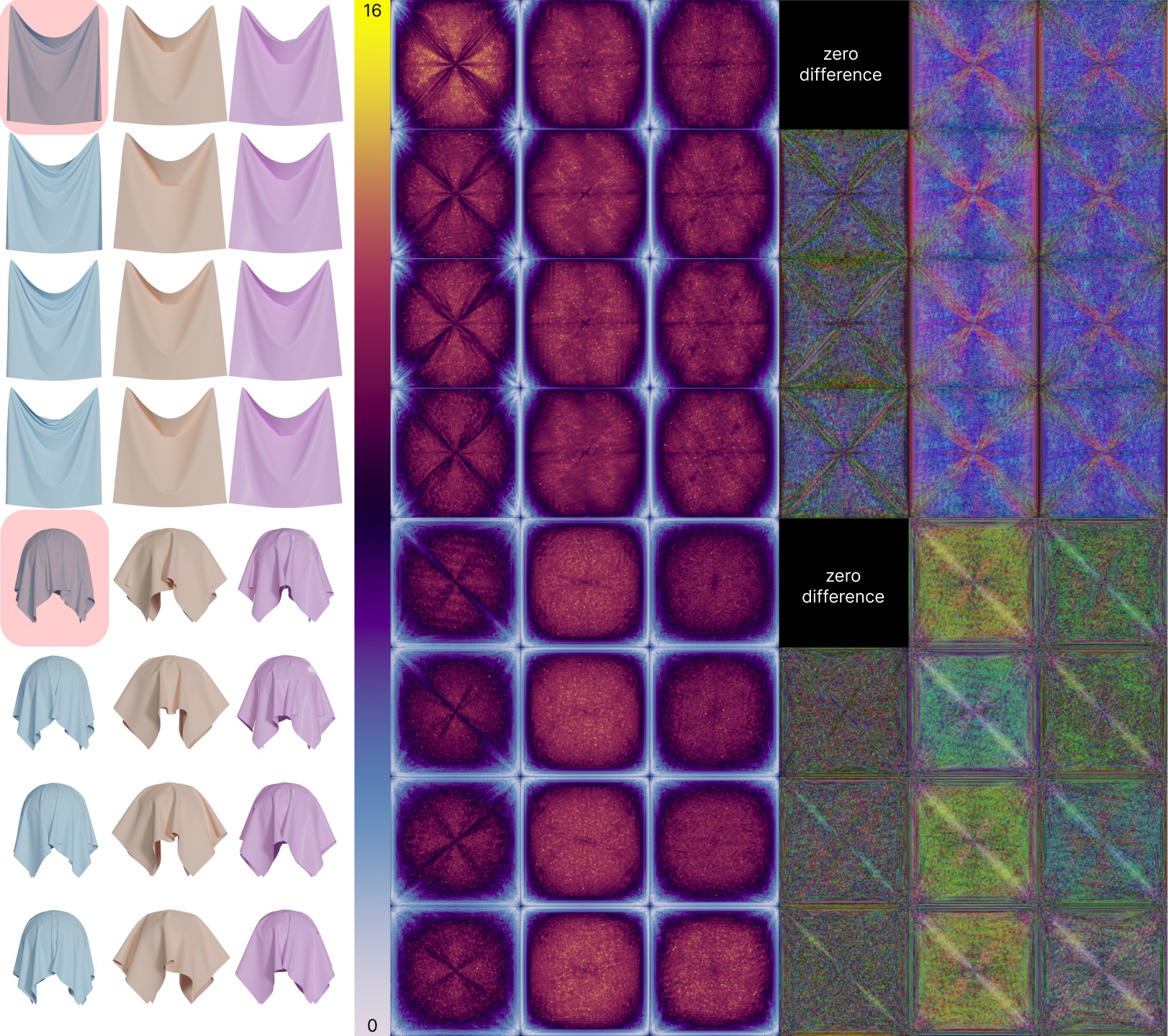
Unphased Wrinkles: Estimating cloth elasticity parameters using a frequency-based loss
Generating realistic clothing for virtual applications like online retail and digital avatars is crucial but requires expert knowledge of 3D tools to generating believable simulations. Recently, a number of works proposed to estimate cloth material properties from specialized c…
Implicit Frictional Dynamics with Soft Constraints
Dynamics simulation with frictional contacts is important for a wide range of applications, from cloth simulation to object manipulation. Recent methods using smoothed lagged friction forces have enabled robust and differentiable simulation of elastodynamics with friction. Howev…
In situ measurement of friction on curved surfaces
In situ measurement of frictional properties, particularly of human skin, is challenging. A major challenge is that the measured surface may be curved and oriented arbitrarily relative to the measurement device, making it difficult to obtain accurate and reliable friction estimat…
Houdini Plugins
I developed the following plugins for Houdini to aid my research in soft tissue simulation. All binaries here are built from open source code available on GitHub. Installation The following instructions demonstrate how to install Houdini plugins on various platforms. Remember to …
Simulating deformable objects for computer animation: a numerical perspective
We examine a variety of numerical methods that arise when considering dynamical systems in the context of physics-based simulations of deformable objects. Such problems arise in various applications, including animation, robotics, control and fabrication. The goals and merits o…
Volume Preserving Simulation of Soft Tissue with Skin
Simulation of human soft tissues in contact with their environment is essential in many fields, including visual effects and apparel design. Biological tissues are nearly incompressible. However, standard methods employ compressible elasticity models and achieve incompressibilit…
Frictional Contact on Smooth Elastic Solids
Frictional contact between deformable elastic objects remains a difficult simulation problem in computer graphics. Traditionally, contact has been resolved using sophisticated collision detection schemes and methods that build on the assumption that contact happens between polyg…
About Me
I am currently a researcher at Meta Reality Labs working on physically based animation. I did my PhD on simulation problems relating to contact and friction at the University of British Columbia supervised by Dinesh K. Pai. During my Master's, I studied fluid simulation at the U…
The Human Touch: Measuring Contact with Real Human Soft Tissues
Simulating how the human body deforms in contact with external objects, tight clothing, or other humans is of central importance to many fields. Despite great advances in numerical methods, the material properties required to accurately simulate the body of a real human have been…
Variational Stokes: A Unified Pressure-Viscosity Solver for Accurate Viscous Liquids
We propose a novel unsteady Stokes solver for coupled viscous and pressure forces in grid-based liquid animation which yields greater accuracy and visual realism than previously achieved. Modern fluid simulators treat viscosity and pressure in separate solver stages, which reduc…
2D Surface Tension Liquids
Liquid simulation has been an interest of mine for some time now. Water, maybe the most ubiquitous liquid familiar to us, exhibits many fascinating visual properties. This makes water simulation a very hot topic in the visual effects industry. In the history of liquid simulatio…
Notes on Transient Imaging
In fall 2014, I took a seminar course in computer graphics, where we reviewed an emerging technology of capturing the propagation of light pulses. This work was sparked in recent years by the work of Velten, Raskar and Bawendi from MIT in their 2011 paper titled "Picosecond camer…
Weighted Lloyd's Method for Voronoi Tesselation
This summer, I developed an algorithm to tesselate an image with Voronoi regions. I used a weighed Lloyd's method to distribute the Voronoi regions evenly throughout the image. You can now see the method on a dedicated static page. The implementation is done entirely in JavaScrip…
SPH for Weakly Compressible Fluids
In winter 2014, I took a course on physically-based simulation, and had the opportunity to work on a fluid simulator project. I finally found some time to organize my work and upload it to GitHub. The project outlines two notable methods in fluid simulation using Smoothed Particl…
Implicit Surface Method for Shape Reconstruction
A few months ago I wrote an implementation of an implicit surface method for shape reconstruction developed, in part, by H. Zhao, S. Osher, B. Merriman, and M. Kang, in their paper (2000) titled "Implicit and Non-parametric Shape Reconstruction from Unorganized Data". This paper …
Experiment with 2D Particle Simulation and Artificial Neural Networks
In an effort to learn more about artificial neural networks, I implemented a simple method to learn the collision response between a pair of circular particles with a constant radius. Although not practically useful, this exercise was enlightening. The details can be found in the…
Slides for Papers on Motion Tracking and Surface Reconstruction
CS 870 is a course at the University of Waterloo that briefly covers numerical PDE solutions, especially to the level set PDE developed by Stanley Osher and James A. Sethian in a paper called "Fronts propagating with curvature-dependent speed" from 1988. I presented two papers fo…
Notes on Numerical Analysis
I decided to typeset the course notes for the Numerical Analysis course (AM740/CM770/CS770) at the University of Waterloo for fall 2013 taught by Hans De Sterck. Use them at your own risk, since they may contain errors:
Undergraduate Research Seminar Talk on Information Theory
At the end of my undergraduate research semester in the summer of 2012 with IQC, I compiled a talk on classical and quantum information. I tried to start with an introduction to classical information and transition into quantum information on a very basic level. This talk should …
Ray Tracer Project
I implemented a ray tracer with rigid body dynamics for my final CS488 project. Unfortunately I didn't have time to complete collision detection for all primitives, and could only demonstrate colliding spheres. Ray Tracer with Rigid Body Dynamics Table of Contents Dynamic Object…
Notes on Continuity of Quantum Channel Capacities
I spent the summer of 2012 as an undergraduate research assistant working under Debbie Leung at the Institute for Quantum Computing. Since then I have decided to pursue a career in computer graphics, although quantum information remains one of my amateur interests. I have compile…