Egor Larionov
I am a researcher currently working at Meta Reality Labs.I am interested in physically-based animation, geometry processing and scientific computing. More about me.
Publications
-
 Quaffure: Real-Time Quasi-Static Neural Hair Simulation ,
Quaffure: Real-Time Quasi-Static Neural Hair Simulation ,
Tuur Stuyck, Gene Wei-Chin Lin, Egor Larionov, Hsiao-yu Chen, Aljaz Bozic, Nikolaos Sarafianos, Doug Roble,
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) ,
-
 PGC: Physics-Based Gaussian Cloth from a Single Pose,
PGC: Physics-Based Gaussian Cloth from a Single Pose,
Michelle Guo, Matt Jen-Yuan Chiang, Igor Santesteban, Nikolaos Sarafianos, Hsiao-yu Chen, Oshri Halimi, Aljaž Božič, Shunsuke Saito, Jiajun Wu, C. Karen Liu, Tuur Stuyck, Egor Larionov,
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) ,
-
 DiffAvatar: Simulation-Ready Garment Optimization with Differentiable Simulation,
DiffAvatar: Simulation-Ready Garment Optimization with Differentiable Simulation,
Yifei Li, Hsiao-yu Chen, Egor Larionov, Nikolaos Sarafianos, Wojciech Matusik, Tuur Stuyck,
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) ,
-
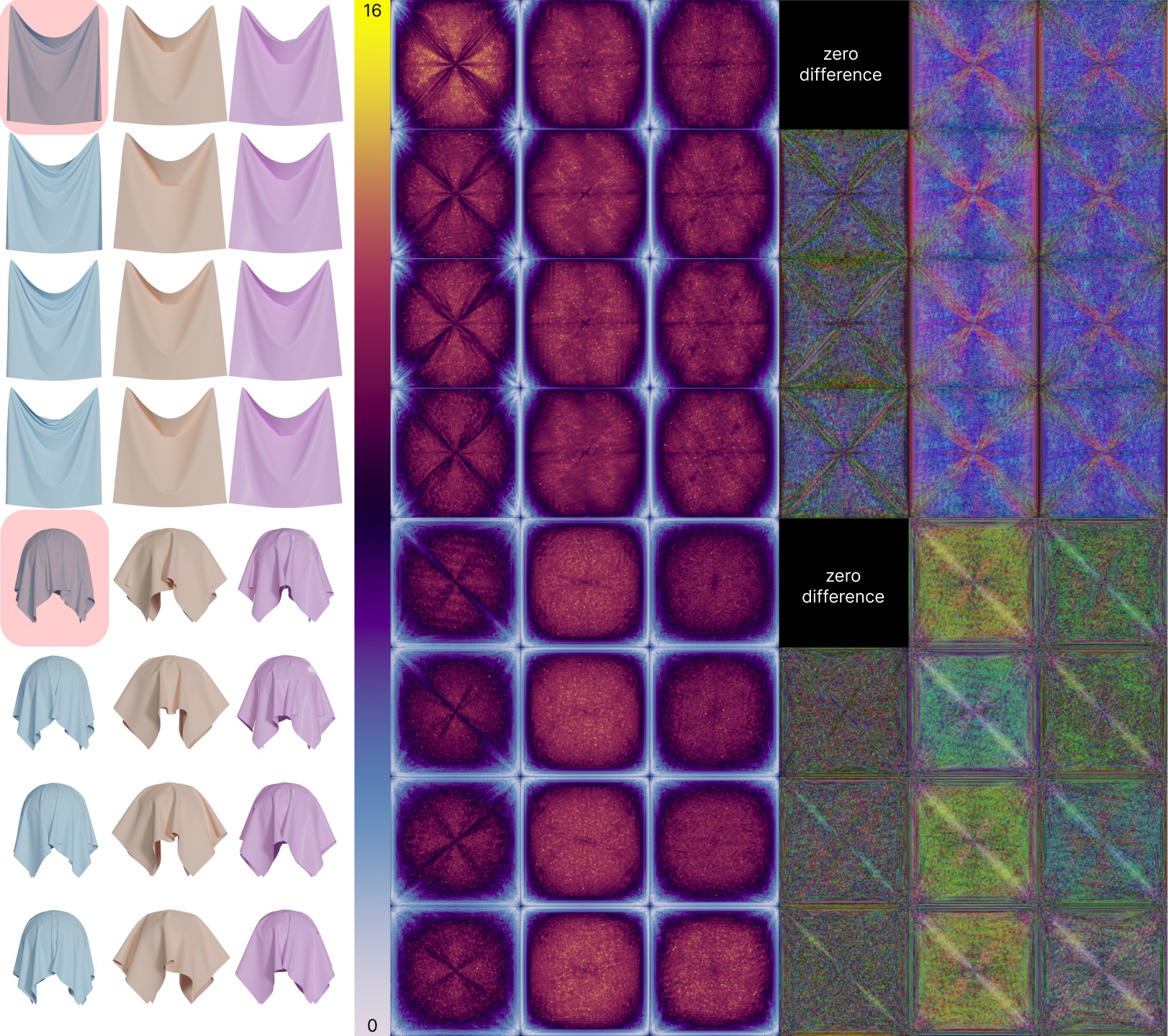
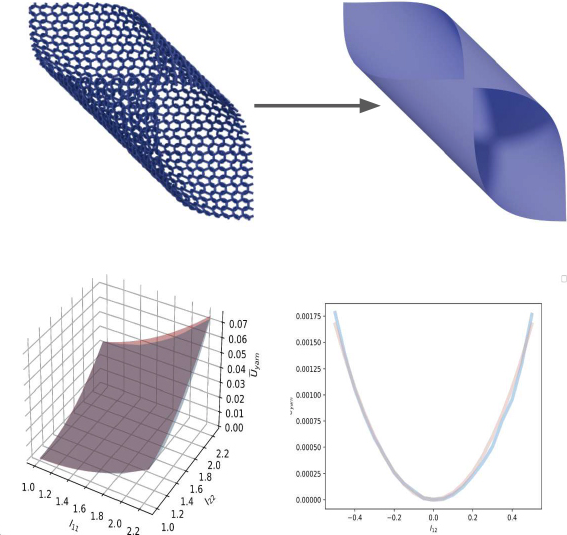 Estimating Cloth Elasticity Parameters From Homogenized Yarn-Level Models,
Estimating Cloth Elasticity Parameters From Homogenized Yarn-Level Models,
Joy Xiaoji Zhang, Gene Wei-Chin Lin, Lukas Bode, Hsiao-yu Chen, Tuur Stuyck, Egor Larionov,
ACM SIGGRAPH Conference on Motion, Interaction, and Games (MIG) ,
-
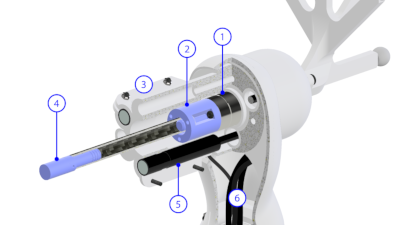
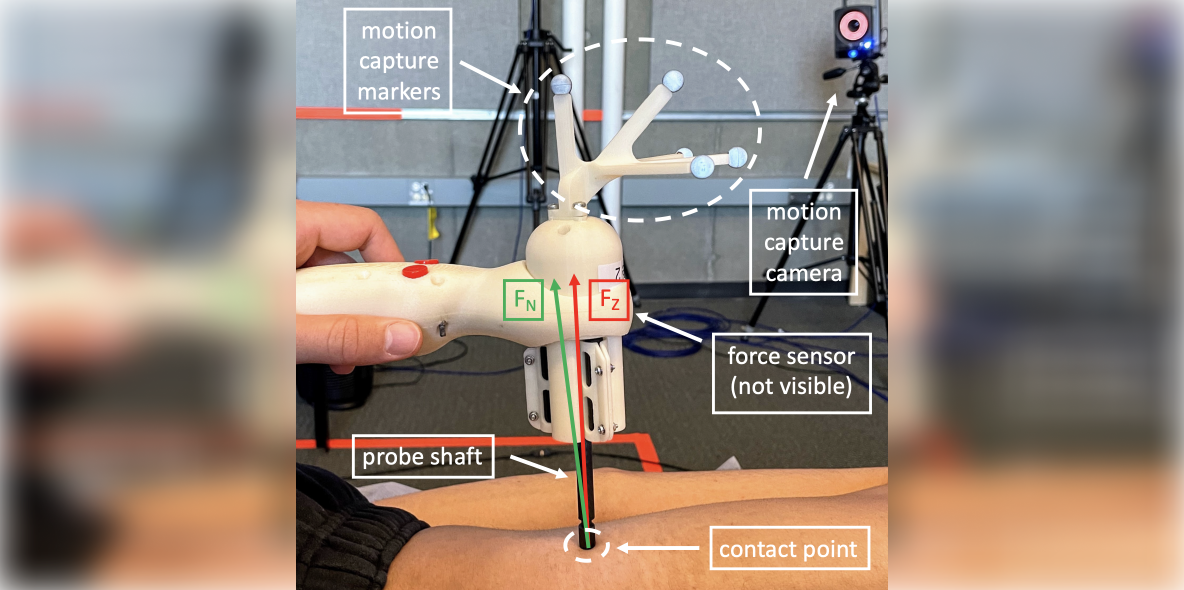 In situ measurement of friction on the human body,
In situ measurement of friction on the human body,
Pearson A. Wyder-Hodge, Egor Larionov, Dinesh K. Pai,
Tribology International ,
-
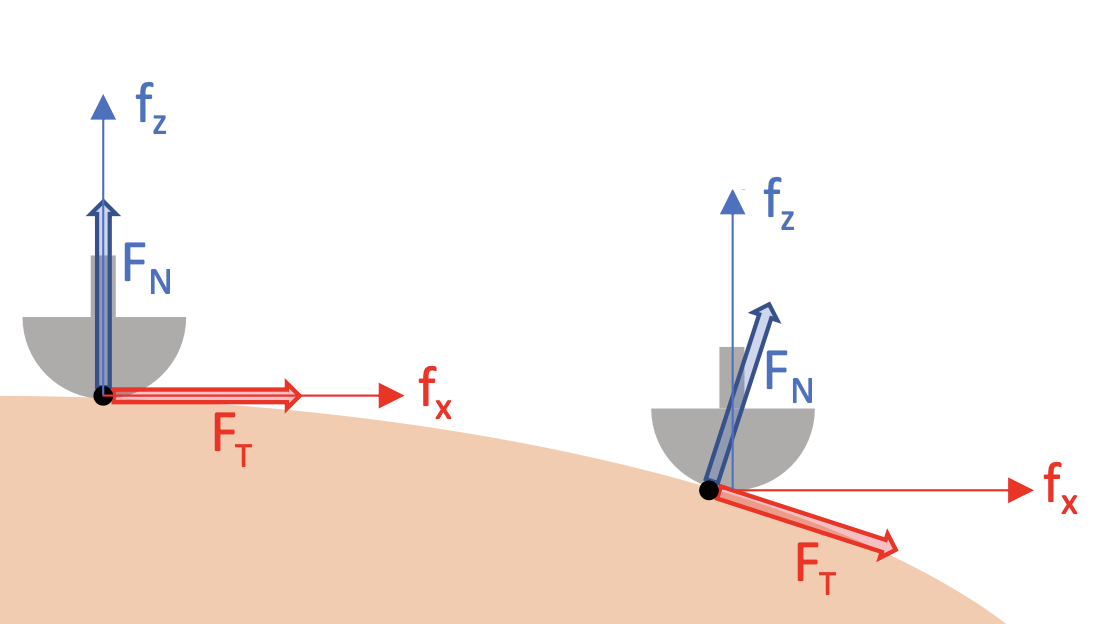
 Constrained dynamics with frictional contact on smooth surfaces,
Constrained dynamics with frictional contact on smooth surfaces,
Egor Larionov,
PhD Thesis (University of British Columbia) ,
-
 Implicit Frictional Dynamics with Soft Constraints,
Implicit Frictional Dynamics with Soft Constraints,
Egor Larionov, Andreas Longva, Uri M. Ascher, Jan Bender, Dinesh K. Pai,
IEEE Transactions on Visualization and Computer Graphics (TVCG) ,
-
 In situ measurement of friction on curved surfaces,
In situ measurement of friction on curved surfaces,
Pearson A. Wyder-Hodge, Egor Larionov, Dinesh K. Pai,
Tribology International ,
-
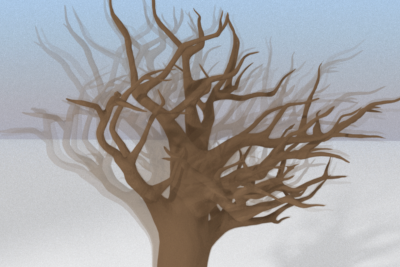 Simulating deformable objects for computer animation: a numerical perspective,
Simulating deformable objects for computer animation: a numerical perspective,
Uri M. Ascher, Egor Larionov, Seung Heon Sheen, Dinesh K. Pai,
Journal of Computational Dynamics ,
-
 Volume Preserving Simulation of Soft Tissue with Skin,
Volume Preserving Simulation of Soft Tissue with Skin,
Seung Heon Sheen, Egor Larionov, Dinesh K. Pai,
Proceedings of the ACM on Computer Graphics and Interactive Techniques ,
-
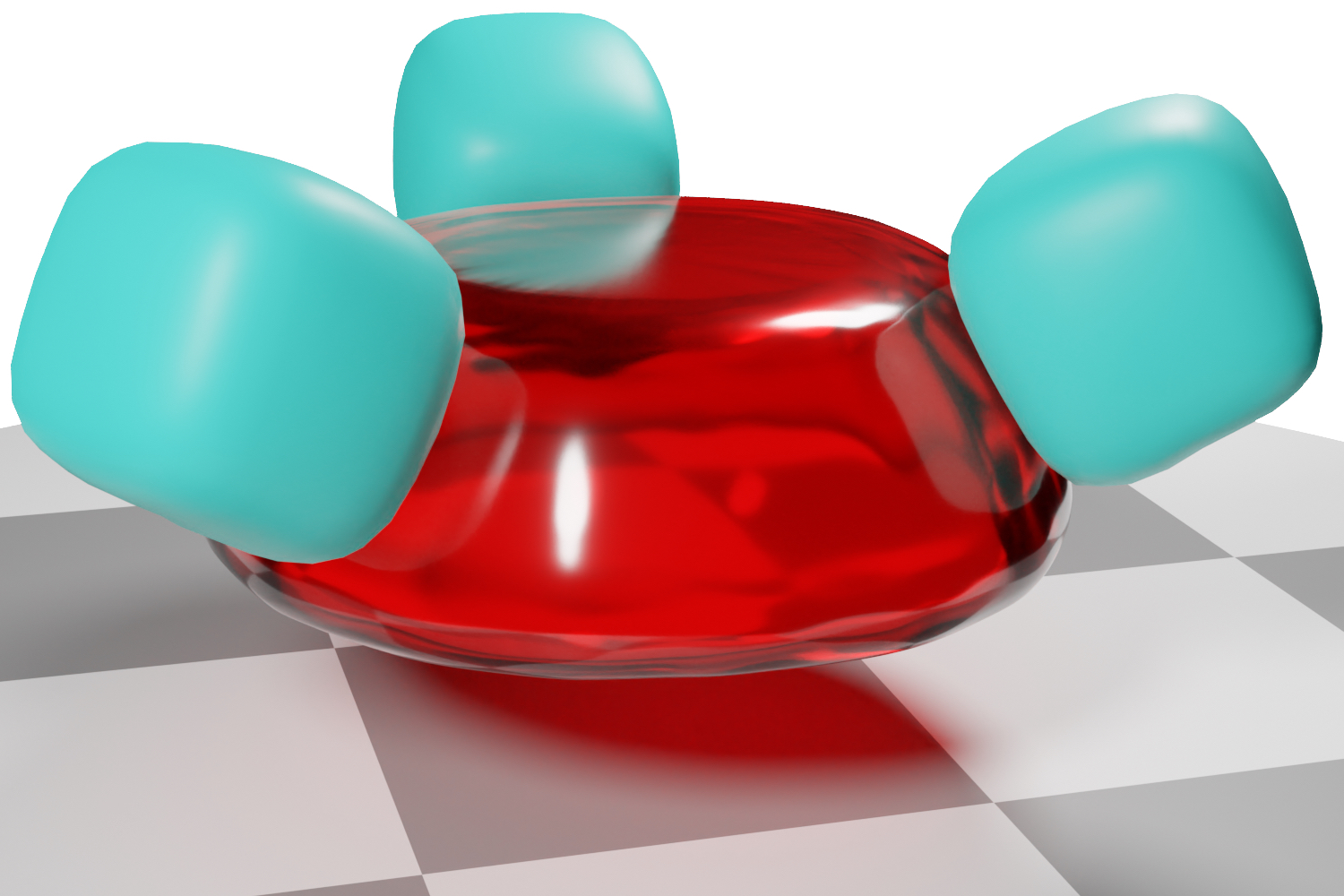
 Frictional Contact on Smooth Elastic Solids,
Frictional Contact on Smooth Elastic Solids,
Egor Larionov, Ye Fan, Dinesh K. Pai,
ACM Transactions on Graphics ,
-
 The Human Touch: Measuring Contact with Real Human Soft Tissues,
The Human Touch: Measuring Contact with Real Human Soft Tissues,
Dinesh K. Pai, Austin Rothwell, Pearson Wyder-Hodge, Alistair Wick, Ye Fan, Egor Larionov, Darcy Harrison, Debanga R. Neog, Cole Shing,
ACM Transactions on Graphics (SIGGRAPH) ,
-
 Variational Stokes: A Unified Pressure-Viscosity Solver for Accurate Viscous Liquids,
Variational Stokes: A Unified Pressure-Viscosity Solver for Accurate Viscous Liquids,
Egor Larionov*, Christopher Batty*, Robert Bridson, (*Joint first authors)
ACM Transactions on Graphics (SIGGRAPH) ,
-